...Instructif...
|
« LA PALE DHELICOPTERE » |
Ce
qui est souhaitable de lire pour comprendre le fonctionnement qualitatif
dune pale dhélicoptère.
< Dans le
corps du texte, le symbole « Ò
» renvoie à la modélisation
du rotor en vol stationnaire>
| HHH |
| HHH |
| Rappels sur les profils |
|
|
Les paramètres géométriques dun profil sont en général définis par :
Il résulte de ces précisions que pour un profil symétrique, la ligne de cambrure est confondue avec la corde. Un profil possède une cambrure quand la courbure de la ligne dextrados est plus prononcée que celle dintrados, généralement dans la partie avant du profil (ligne médiane convexe). Un profil possède une zone « réflexe » quand la courbure de la ligne dextrados est moins prononcée que celle dintrados dans la partie proche du bord de fuite du profil (ligne médiane concave). La combinaison des deux effets donne une ligne médiane en « S » (point dinflexion). Exemple ci-dessous dun profil « S » : cambrure de bord dattaque et zone réflexe en bord de fuite: |

Profil
Vertol V2310_1.58 (profil « S »)
| Comportement des profils |
|
|
Le comportement dun profil dépend des régimes de fonctionnement de la couche limite qui lentoure lorsquil est animé dune vitesse par rapport à lair ambiant. La couche limite est caractérisé par un cisaillement intense des couches dair depuis la surface du profil (molécules dair attachées à la surface par viscosité : vitesse nulle par rapport au profil, vitesse maximale par rapport à lair ambiant) jusquà la limite où la vitesse a rejoint celle de lair ambiant (vitesse maximale par rapport au profil, vitesse nulle par rapport à lair ambiant). On distingue :
|
|
 |
| La
figure suivante représente ces courbes pour un profil Eppler 201
à 6 degrés dangledattaque
|
Il est dusage courant dappeler vitesse à linfini (V) vitesse et direction des filets dair par rapport au profil, en un point quelconque éloigné du profil (plusieurs cordes). Pour contourner le profil, ces filets dair vont être soumis à des accélérations/décélérations et leur vitesse relative (U) peut varier dans des proportions importantes. Au point darrêt, la vitesse relative (U) est égal à 0. Si on suit lévolution du rapport (U/V) sur lextrados, on saperçoit quil peut monter à des valeurs de lordre de 2 au premier % de la corde (accélération considérable due au changement de direction et à la forte dépression) puis il redescend régulièrement à une valeur proche de 1 au bord de fuite. Du côté intrados ce rapport fait linverse et tombe à environ 0,4 (décélération) puis reprend très rapidement une valeur proche de 1 et se maintient ainsi jusquau bord de fuite. Lécartement entre les courbes de vitesse relative extrados/intrados est proportionnel à la portance. A portance nulle ces deux courbes se chevauchent de telle sorte que les surfaces enfermées sont équivalentes et se neutralisent. |

|
Lévolution des vitesses dans lépaisseur des zones laminaires et turbulentes ne sont pas les mêmes : elle est beaucoup plus brutale dans la zone turbulente (gradient de vitesse plus élevé produisant davantage de frottement). Tant que le régime de fonctionnement est laminaire ou turbulent le Cz nest pas affecté ; il ne lest que sil y a décollement de la couche limite, produisant leffet de décrochage. Le but est de maintenir la couche limite le plus loin possible en régime laminaire sur lextrados (faibles frottements). Lorsque langle dattaque augmente et que lon se rapproche du décrochage, il se crée un point de séparation au bord de fuite remontant lextrados vers le bord dattaque, pendant que le point darrêt au bord dattaque recule de plus en plus sous lintrados (jusqu'à une dizaine de % de la corde). Pour remplir toutes les conditions du régime laminaire, il faut que les formes du profil gèrent le mieux possible lénergie cinétique apportée par lécoulement de lair à lextrados pour leur permettre datteindre le bord de fuite (la vitesse y est de lordre de 85% seulement de la vitesse à linfini amont, approximativement à une corde). Si les lignes de flux sécartent rapidement de la surface du profil, il y a séparation de la couche limite et nette augmentation de la traînée. Pour certains profils en fonction de leurs courbures extrados, il peut y avoir séparation puis rattachement de la couche limite en amont sur lextrados, créant une bulle enfermant un régime turbulent (traînée ++), phénomène souvent précurseurs du décrochage; des techniques ont été parfois développées pour rétablir la zone laminaire par aspiration des bulles. De même quand le rayon de courbure du bord dattaque est faible, laccélération des particules dair vers lextrados en partant du point darrêt peut être considérable et provoquer une bulle sous leffet de la force centrifuge imposée par la trajectoire. |

|
Létat de surface joue un rôle important sur la couche limite et les frottements. Une surface de type carborandum fin peut forcer un passage de régime laminaire à turbulent. Ce moyen (appelé turbulateur) peut être utilisé en bord dattaque pour retarder le décrochage en bénéficiant de la stabilité de la couche turbulente, le Cx étant malheureusement augmenté aux faibles angles dattaque. Tous les profils sont caractérisés par trois coefficients principaux : traînée, portance, moment, mesurés en soufflerie principalement en fonction de langle dattaque et du Nombre de Reynolds. Ces coefficients sont à la base du calcul des forces aérodynamiques. Lépaisseur relative, le rayon de courbure de bord dattaque et la cambrure affectent les coefficients du profil de la façon suivante:
Un profil est conçu ou choisi pour une application donnée (paramètres denvironnement : Reynolds, Mach, plage dutilisation, etc.). En général pour un hélicoptère, on recherche :
|

Courbes Cx, Cz, Cm pour des valeurs de Reynolds de 160000, 120000, 80000, 40000 (alfa : angle dattaque)
| Conclusions générales sur les performances des profils |
|
| Nombre de Reynolds et de Mach |
|
|
Le nombre de Reynolds (Re) est un nombre sans dimension caractérisant le régime découlement dun fluide autour dun solide (par exemple un profil daile). Il est défini par la relation : Re = L.V / n où :
Ce nombre, lié au rapport entre forces dinertie et forces de viscosité au voisinage dun corps, joue un grand rôle dans le domaine subsonique où ces deux types de forces sont alors prépondérantes. Aux faibles nombres de Reynolds (faibles vitesses), les forces de viscosité prédominent et les écoulements sont dits « laminaires ». Aux fortes vitesses, limportance des forces dinertie rend les écoulements « turbulents ». Deux profils homothétiques, mais de corde différentes (par exemple pour comparer un modèle réduit et un modèle grandeur), utilisés sous le même angle dattaque, présentent des écoulements pratiquement semblables en tous points lorsquils travaillent au même Nombre de Reynolds (les distributions des vitesses, des pressions, des forces, se déduisent par similitude). Dans ces conditions, leur CX sont identiques. La connaissance du CX dun type de profil en fonction de Re permet donc de connaître le comportement de tout profil de ce type quelles que soient ses dimensions et sa vitesse. Par exemple dans le cas dune pale ce nombre varie en fonction de la vitesse au rayon considéré; le Cx peut alors être calculé pour chaque section à laide dune formule de correction (fonction hyperbolique). Les performances dun profil sont dautant meilleures quil travaille à un Nombre de Reynolds élevé. Pour se trouver dans des conditions similaires à un modèle grandeur, un modèle réduit devrait donc voler plusieurs fois plus vite que le modèle grandeur, ce qui nest malheureusement pas réalisable, doù nos performances dégradées en modèle réduit. Sous leffet de la vitesse, la compressibilité de lair modifie les écoulements et les coefficients Cz, Cx, Cm sont affectés et peuvent être corrigé par une formulation simple dépendant du nombre de Mach (vitesses comprises entre Mach 0,3 et Mach 0,8). |
| Laérodynamique |
|
|
Un rotor dhélicoptère comprend plusieurs pales dont chacune présente une constitution proche de celle de laile davion. Toutefois, trois phénomènes essentiels font apparaître des éléments spécifiques à cette étude :
Ceci modifie
la composition des vitesses incidentes vis à vis du profil.
Composition des vents
|

|
|

|
La traînée est portée par laxe de vent apparent et la portance lui est normale. |

|
Puisque les axes mentionnés sont inclinés de la valeur de langle de vent apparent, il faut projeter portance et traînée sur laxe rotor dune part et sur le plan dentraînement dautre part pour obtenir la poussées axiale et la traînée résultante. La poussée axiale « Ò » correspond aux projections sur larbre rotor de la portance moins celle de la traînée. La traînée résultante correspond aux projections sur le plan dentraînement de la portance plus celle de la traînée. La traînée résultante est à la base du calcul du couple axial « Ò » et de la puissance absorbée qui correspond à lobjectif recherché, de préférence sous la forme de la puissance spécifique « Ò » du rotor exprimée en W/kg. On remarquera que la poussée axiale est déficitaire par rapport à la portance et que la traînée résultante est en excédent par rapport à la traînée. Cela correspond à des pertes inévitables : on obtient moins de poussée et plus de traînée. On voit aussi que plus les angles dattaque et de vent apparent sont importants, plus les pertes le sont également, ceci étant dautant plus significatif que la portance est grande par rapport à la traînée. En fait, il est dusage courant de considérer que la traînée résultante est la somme dune traînée dite de forme (intrinsèque au profil et due aux forces de viscosité) et dune traînée dite induite (projection de la portance). Pour produire une poussée donnée, à corde et diamètre rotor fixés, un profil cambré obtiendra le résultat pour des angulations réduites avec pour conséquence une portance moins inclinée et donc moins de traînée induite. Ceci est valable pour comprendre un aspect important qui permet de minimiser les pertes, mais seule une modélisation « Ò » complète permet de trouver une solution optimale. Ne pas oublier cependant que le paramètre le plus « consommateur » dénergie est la vitesse de rotation qui intervient par son carré. |
| Les contraintes combinées |
|
|
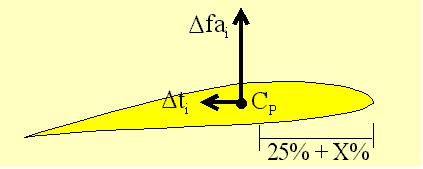
Définition des centres Le centre de gravité (CG) dune pale est le point interne de la pale qui permet de la conserver en équilibre quelque soit son orientation dans lespace. Cest sur ce point que sapplique les résultantes des forces de gravité et centrifuge. La connaissance de ce point permet de calculer le moment de pale (moment statique) qui est le produit de la distance du centre de gravité à laxe rotor par la masse de la pale. Sa détermination peut être effectuée en collant un adhésif de protection sur la zone présumée, puis en retournant et en positionnant la pale en équilibre sur la lame dun cutter. Lintersection de deux marquages croisés fournit une très bonne estimation de la position X, Y de ce point (la position en Z est interne à la pale si celle-ci est rectiligne). Ne pas oublier que pour lanalyse élémentaire de la pale, chaque segment a une masse et un centre de gravité propres, situé en général à la même distance du bord dattaque que le centre de gravité de la pale (pale rectangulaire). Le centre de gravité naturel dune pale homogène se situe à environ 40% du bord dattaque quelque soit le profil. Le centre aérodynamique (CA) ou foyer dun profil quelconque est le point, situé conventionnellement à 25% de la corde à partir du bord dattaque. En ce point le coefficient de moment est pratiquement indépendant de langle dattaque (ou tout au moins cest en ce point quil en est le moins dépendant) ; la valeur de ce coefficient est soit nulle pour un profil symétrique soit négative pour un profil cambré. Les banques de profils indiquent la valeur du coefficient de moment implicitement relatif au centre aérodynamique. Sur une pale, la valeur du moment varie en fonction de la position du segment considéré. Le centre de poussée (CP) « Ò » dun profil quelconque est le point pour lequel le moment est nul et donc la résultante aérodynamique sapplique seule à ce point. Pour un profil symétrique, le centre aérodynamique et le centre de poussée sont confondus. Pour un profil cambré, le centre de poussée se situe en général en arrière du centre aérodynamique et dautant plus que la cambrure est prononcée ( de 25% pour un profil symétrique, il peut reculer à près de 50% pour certains profils cambrés). Le centre de poussée se déduit du centre aérodynamique par conversion du système de forces (voir encadré). Dans le cas de profils cambrés, le centre de poussée se déplace lorsquon fait croître langle de pas en se rapprochant progressivement du centre aérodynamique. Le centre de rotation (CR) est le point mécanique autour duquel la pale va effectuer ses rotations de pas et par lequel passe laxe longitudinal de la pale. Il est souhaitable de le choisir proche du centre de gravité. Cette position na aucun effet sur la torsion de la pale et influence peu le moment résultant de la pale, cest à dire les efforts de commande. Pour tout profil et pour minimiser les effets de torsion (expliqué plus loin), il est idéal que la moyenne des centres poussée (en envergure) coïncident avec le centre de gravité. Cette position commune se situe donc à 25% pour un profil symétrique (nécessité de plomber le bord dattaque pour obtenir ce résultat) et pourra être de lordre de 40% pour des profils cambrés (avec lavantage de ne pas avoir à plomber). |